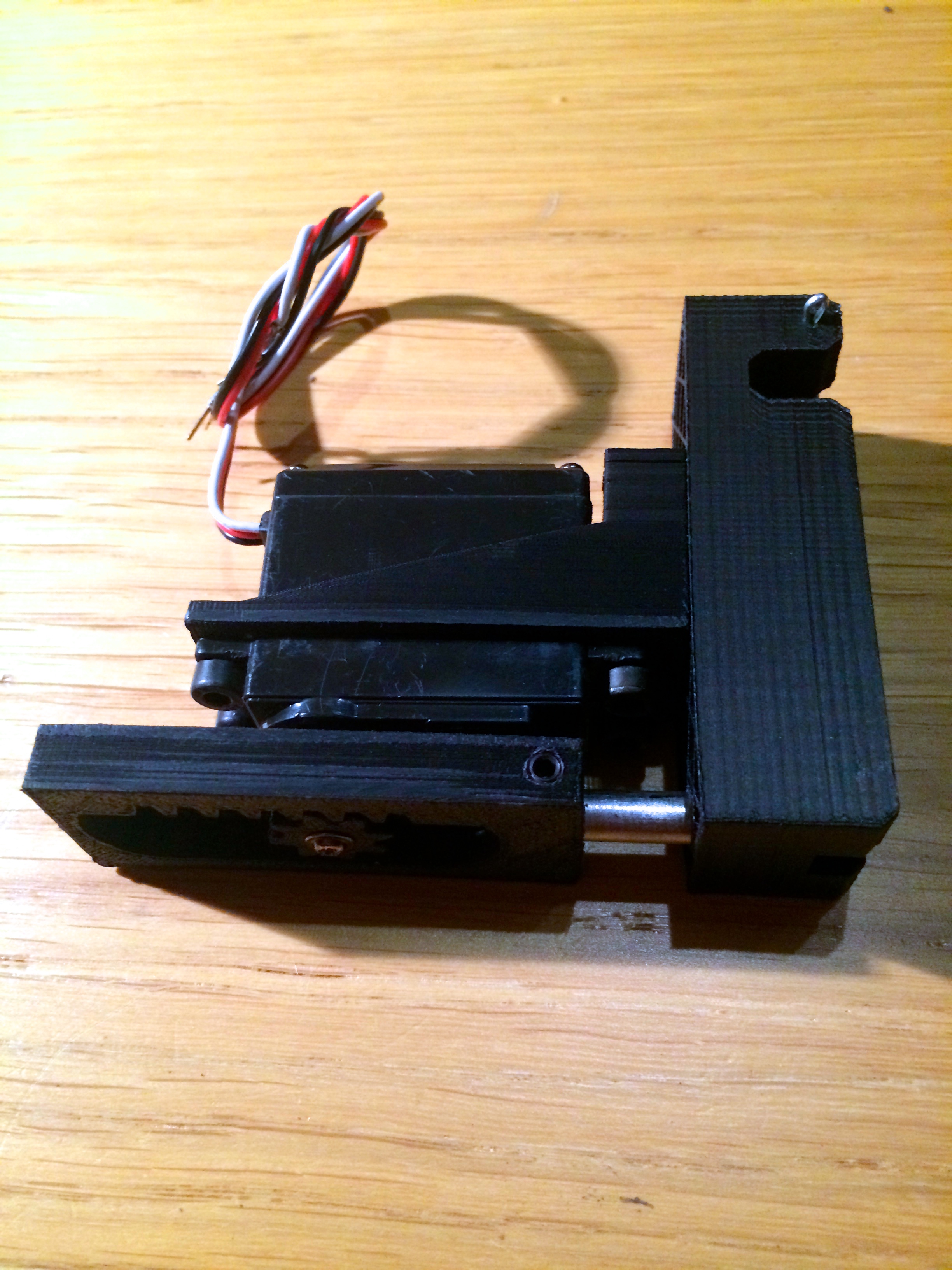
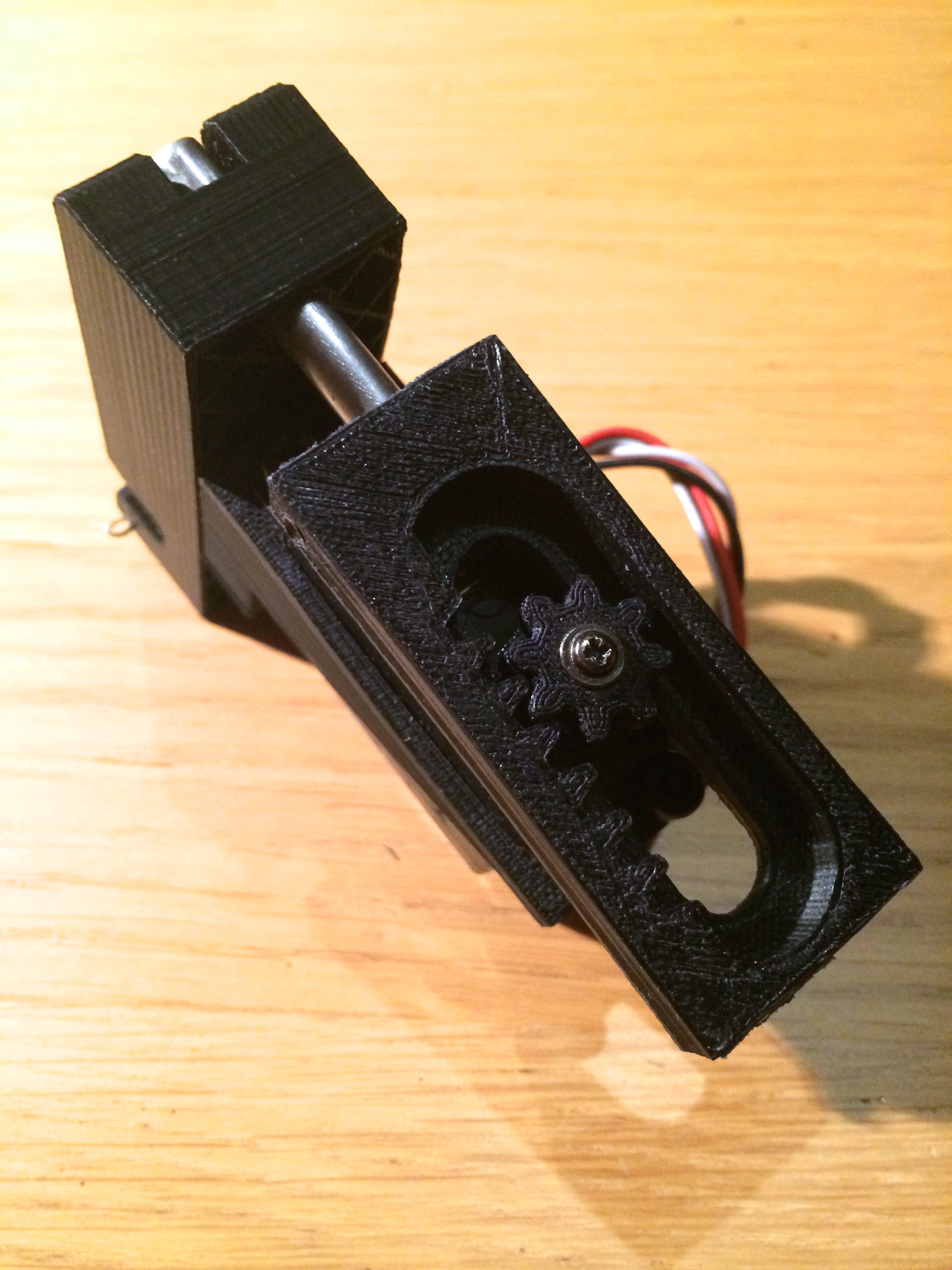

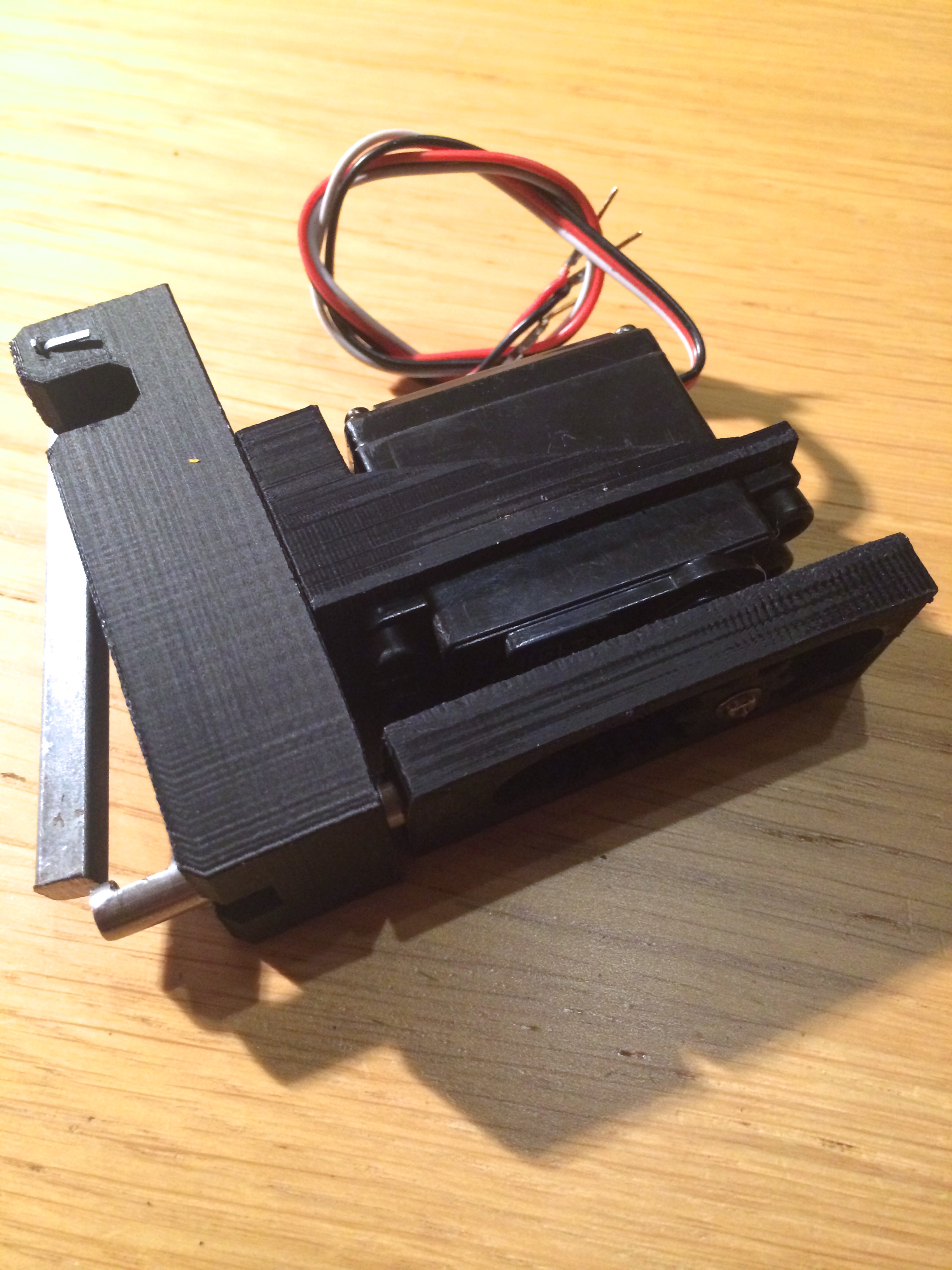
 Nu tror jag att jag lyckats förenkla och minimerat alla svaga länkar i konstruktionen. Det finns inte så mycket som kan gå fel, och det är relativt enkelt att montera utan några större justeringar. Jag skulle naturligtvis kunna optimera kuggstångssläden så att den blir lättare att passa in när man monterar ihop delarna. Jag upptäckte när jag testade konstruktionen att servot drar åt fel håll jämfört med logiken i programmet, men det är betydligt enklare att byta ut en etta mot en nolla, än att spegelvända kuggstångssläden. Nu ska jag försöka hitta en bra och kompakt apparatlåda som rymmer både servomekanismen och kretskortet. Jag kan inte vara annat än nöjd så här långt i EquiFeeder-projektet.
Nu tror jag att jag lyckats förenkla och minimerat alla svaga länkar i konstruktionen. Det finns inte så mycket som kan gå fel, och det är relativt enkelt att montera utan några större justeringar. Jag skulle naturligtvis kunna optimera kuggstångssläden så att den blir lättare att passa in när man monterar ihop delarna. Jag upptäckte när jag testade konstruktionen att servot drar åt fel håll jämfört med logiken i programmet, men det är betydligt enklare att byta ut en etta mot en nolla, än att spegelvända kuggstångssläden. Nu ska jag försöka hitta en bra och kompakt apparatlåda som rymmer både servomekanismen och kretskortet. Jag kan inte vara annat än nöjd så här långt i EquiFeeder-projektet.
Alla mina projekt
En blogg om mina projekt
